W obecnych czasach sytuacja gospodarcza zmienia się bardzo dynamicznie. Rynek stał się bardzo konkurencyjny, gdzie dodatkowo swoboda przepływu towarów i usług sprawia, że producenci z wielu branż walczą o klienta na globalnej arenie. Z jednej strony praca staje się coraz droższa, z drugiej strony jednak rynek zmusza producentów do wytwarzania produktów coraz taniej. W takich warunkach postępująca robotyzacja staje się faktem i warto też zdać sobie sprawę, że odwrotu od tej ścieżki nie ma.
Roboty są w stanie wyręczyć nas w najbardziej żmudnych, powtarzalnych czynnościach. Są przy tym ekstremalnie wydajne. Postęp technologiczny sprawia, że są wykorzystywane do coraz bardziej skomplikowanych czynności. Stają się też coraz bardziej przystępne cenowo.
Dziś na robotyzację produkcji stawiają niemal wszyscy. Nasz rynek pod tym względem jest bardzo atrakcyjny, szczególnie w obszarze produkcji w sektorze motoryzacyjnym, metalowym, maszynowym czy chemicznym. Poziom robotyzacji w Polsce stale rośnie, jednak jest ciągle niski w porównaniu do innych krajów naszego regionu.

W tym artykule przybliżę tematykę programowania robotów z wykorzystaniem oprogramowania SOLIDWORKS/CAMWorks (popularnych narzędzi CAD/CAM) i dedykowanego modułu Eureki Robot, służącego do symulacji pracy robota, jak i wygenerowania właściwego programu.
Dlaczego Eureka? Ponieważ jest liderem na rynku w dziedzinie symulacji, szczególnie symulacji robotów.
Symulator ten wykorzystywany jest w celu programowania offline robotów i sprawdzania poprawności kodu. Takie programowanie robotów przemysłowych jest dużo szybszą alternatywą dla ręcznego programowania na stanowisku. Polega na wygenerowaniu ścieżki narzędzia (np. freza, palnika) w programie CAMWorks (maksymalnie 5-osiowej) i dopasowaniu jej do struktury kinematycznej robota, który może mieć 6 i więcej osi sterowanych numerycznie oraz osie zewnętrzne. Eureka konwertuje kod APT generowany przez programy typu CAM na kod zrozumiały przez roboty, używając dedykowanego do konkretnego typu robota postprocesora. Podczas tego procesu Eureka oblicza optymalne ruchy robota i zewnętrznych osi, symulując je wszystkie. Program wykrywa problemy takie jak osobliwości, kolizje, wyjazdy poszczególnych osi poza ich zakres i oferuje łatwe narzędzia do naprawy takich błędów. Kolizje wykrywane są dla wszystkich części, włączając w to obrabiany półfabrykat. Wersja 64-bitowa pozwala na bardzo szybkie przetworzenie plików o nieograniczonej wielkości. Eureka pozwala na efektywne wykorzystanie stanowiska zrobotyzowanego oraz sprawdzenie krok po kroku zachowania robota oraz efektów jego pracy.
Główne cechy to:
- Realistyczna symulacja całej celi,
- Rzeczywista symulacja usuwanego materiału,
- Detekcja kolizji,
- Automatyczna wymiana narzędzi,
- Interaktywna edycja trajektorii ruchu narzędzia,
- Automatyczna optymalizacja pracy robota i zewnętrznych osi,
- Obróbka tarczami i piłami,
- Dostosowanie do wszystkich robotów przemysłowych dostępnych na rynku: ABB, Kuka, Fanuc, Motoman, Kawasaki, Staubli, Comau.
Operacje możliwe do zasymulowania:
- Frezowanie,
- Malowanie,
- Spawanie,
- Szlifowanie,
- Wycinanie robotem,
- Manipulacja przedmiotami.
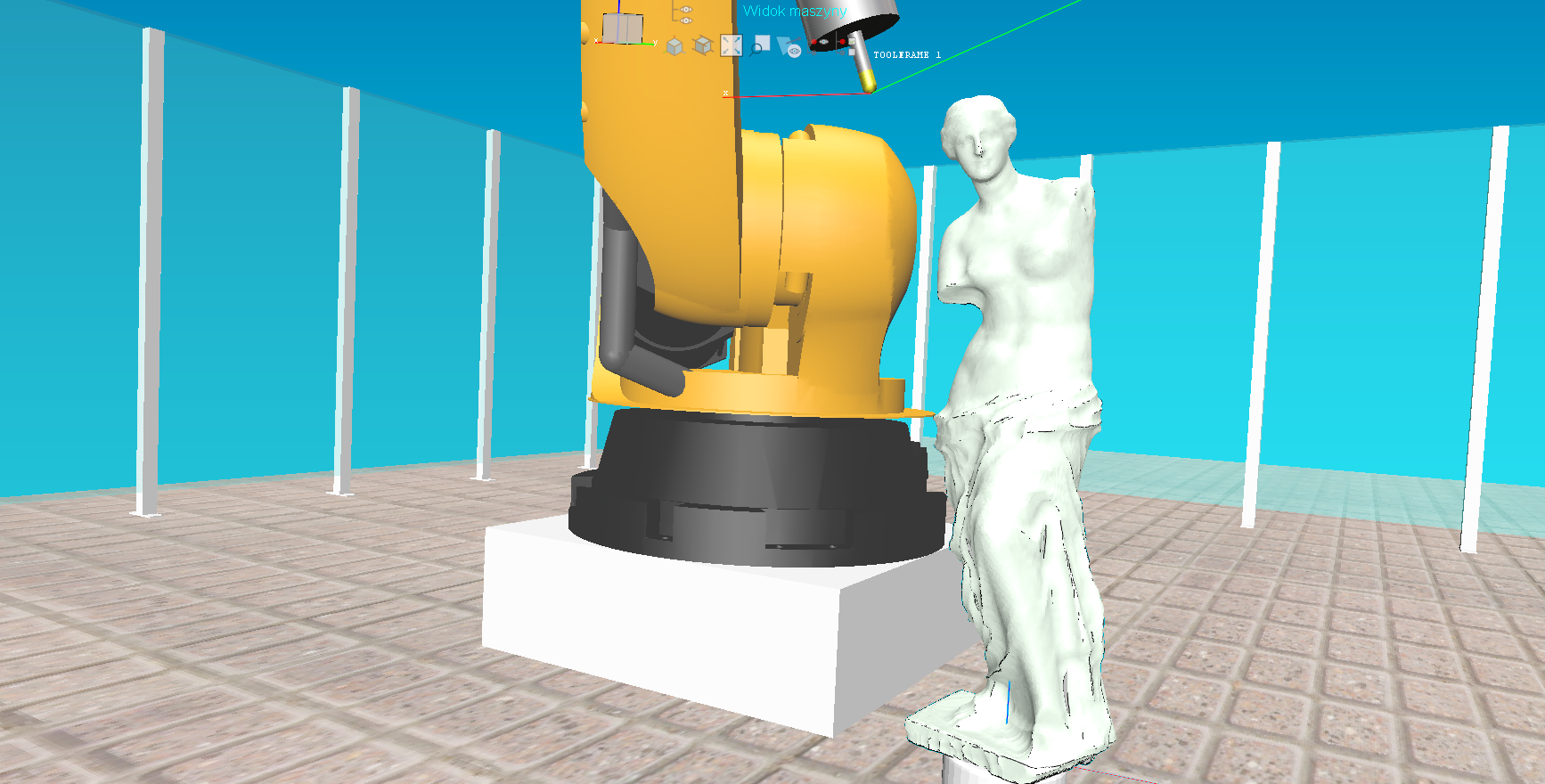
Poniżej przedstawię krok po kroku w jaki sposób można zaprogramować robota przy użyciu SOLIDWORKS, CAMWorks i Eureka Robot. Na przykładzie programowania robota frezującego, przygotuję obróbkę modelu słynnego posągu Wenus z Milo.

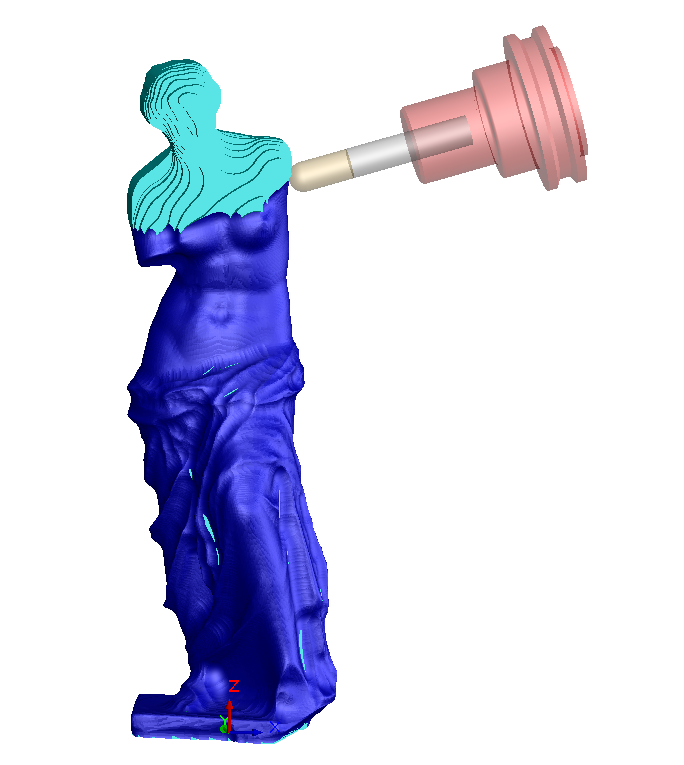
Przygotowanie odpowiednich ścieżek narzędzia dla Eureki, nie różni się niczym od przygotowania normalnej obróbki frezowania. Przy czym, dbając o oddanie szczegółów i wierne odzwierciedlenie ich w obróbce tak skomplikowanego modelu, wykorzystałem zaawansowane operacje 5-osiowe.
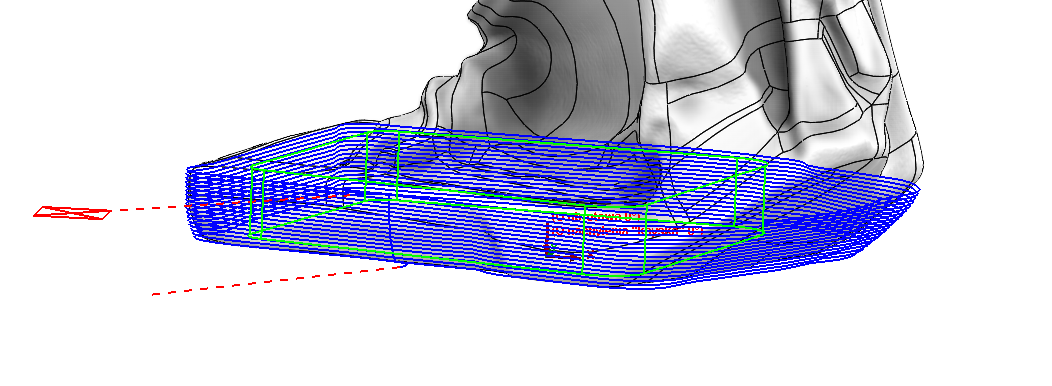
Całą obróbkę podzieliłem też na kilka operacji, zwracając przy tym uwagę na kształt obrabianych powierzchni tak, aby jak najlepiej dopasować do nich trajektorię ruchu narzędzia, uzyskując gładkie cięcie, nieprzerywane żadnymi wjazdami i wyjazdami z materiału.
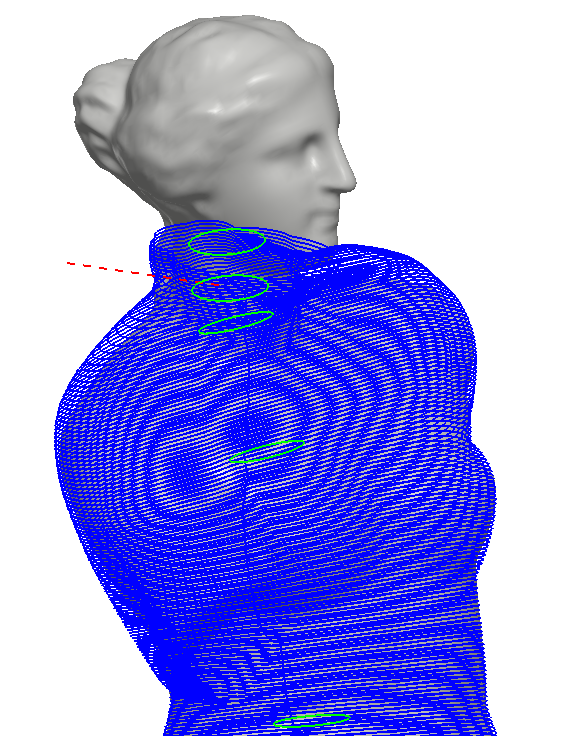
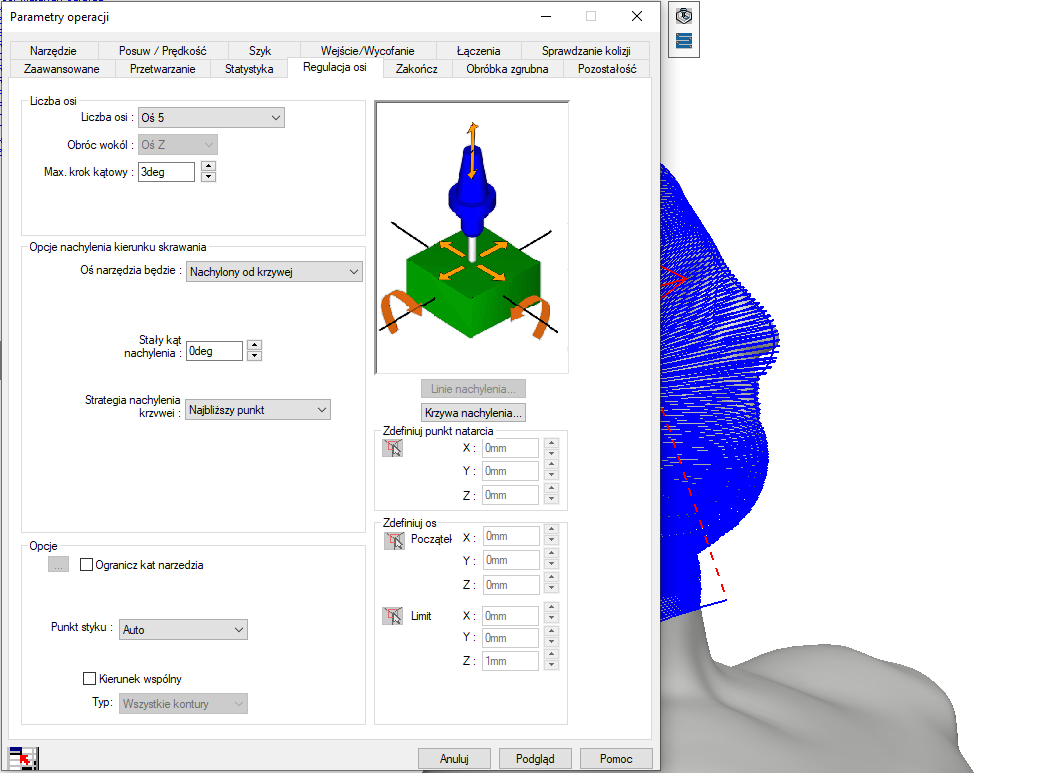
Dobrze wyglądające ścieżki to nie wszystko. Bardzo istotna w kontekście obróbki wieloosiowej jest kontrola pochylenia narzędzia względem obrabianej powierzchni. Musimy zdawać sobie sprawę z pewnych kinematycznych ograniczeń maszyn, które programujemy, jak na przykład maksymalne kąty pochylenia narzędzia względem osi obrotowej. W tym konkretnym wypadku wybrałem opcję nachylenia narzędzia do krzywej, co dało właściwy efekt.
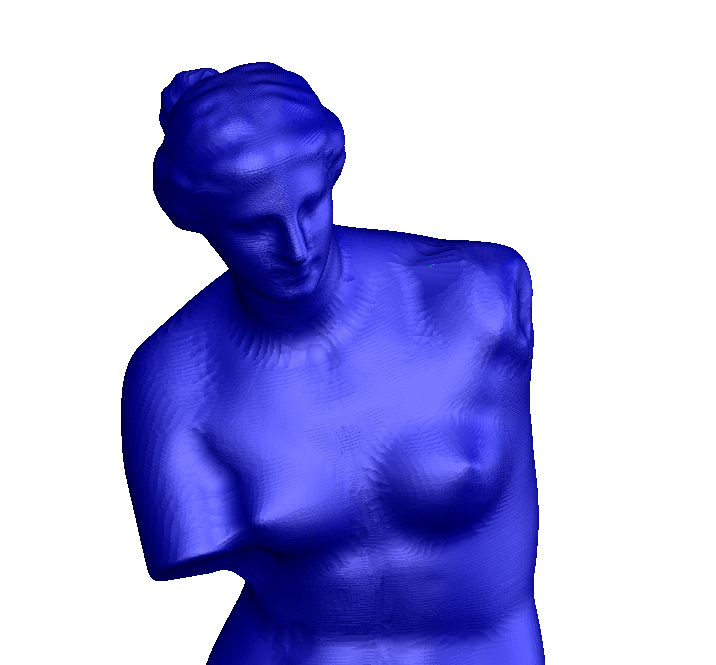
Jak widać, CAMWorks umożliwia nam stworzenie odpowiedniej ścieżki, nawet dla najbardziej wymagających modeli. Pozwala oddać szczegóły twarzy i całej postaci człowieka.
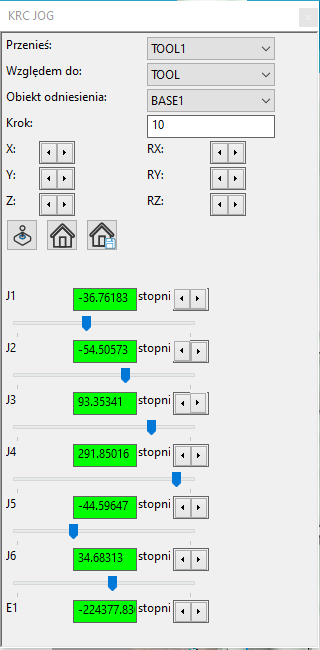
Przed przystąpieniem do pracy założyłem, że model będzie frezowany przy użyciu robota i z uwzględnieniem dodatkowej osi obrotowej. To jest bardzo istotne, gdyż tak jak pisałem, robot będzie posiadał 6 osi sterowanych numerycznie i dodatkowo będzie wyposażony w stół obrotowy, co daje nam w sumie 7 osi do wysterowania. W programach typu CAM tworzymy ścieżkę maksymalnie 5 osiową, co oznacza, że tworząc ją, nie będziemy mogli wykorzystać pełnych możliwości robota. Tu z pomocą przychodzi nam Eureka. Po wygenerowaniu wszystkich operacji otwieramy Eurekę, korzystając z wbudowanego w CAMWorks symulatora G-kodu. Umożliwia to przeniesienie wszystkich danych związanych z obróbką do środowiska wirtualnej maszyny, a w tym konkretnym przypadku − do środowiska wirtualnego robota. Po wyborze opcji Symulacji G-kodu, dalej wszystko odbywa się płynnie i ogranicza się jedynie do wygenerowania kodu za pomocą przygotowanego przez nas specjalnego postprocesora. Eureka włącza się automatycznie wraz ze wszystkimi danymi zaczytanymi z CAMWorks.

W zależności od tego, w jaki sposób mamy skonfigurowanego robota, Eureka konwertuje i optymalizuje kod APT. Oprócz tego mamy też szereg możliwości ręcznej edycji ścieżek i co najważniejsze, w każdym miejscu programu możemy w łatwy sposób modyfikować ustawienie poszczególnych ramion robota. Najczęściej mamy do czynienia z sytuacją, kiedy z jakiegoś powodu np. ustawienia samego detalu, robot nie jest w stanie dojść do określonej pozycji. Możemy w tym wypadku wymusić inne podejście robota do określonego punktu, a następnie Eureka zaktualizuje pozycje dla następnych przejść. Miejmy na względzie to, że kod 5-osiowy nie jest wystarczający, żeby w pełni zdefiniować ruch robota. Stąd też olbrzymia rola Eureki w optymalizacji kodu wygenerowanego w programach typu CAM.
Na poniższych zdjęciach możemy zobaczyć sam proces obróbki. Widzimy jak ścieżki 5-osiowe zostały przekonwertowane na symultaniczne ruchy poszczególnych przegubów robota i zewnętrznej osi obrotowej.
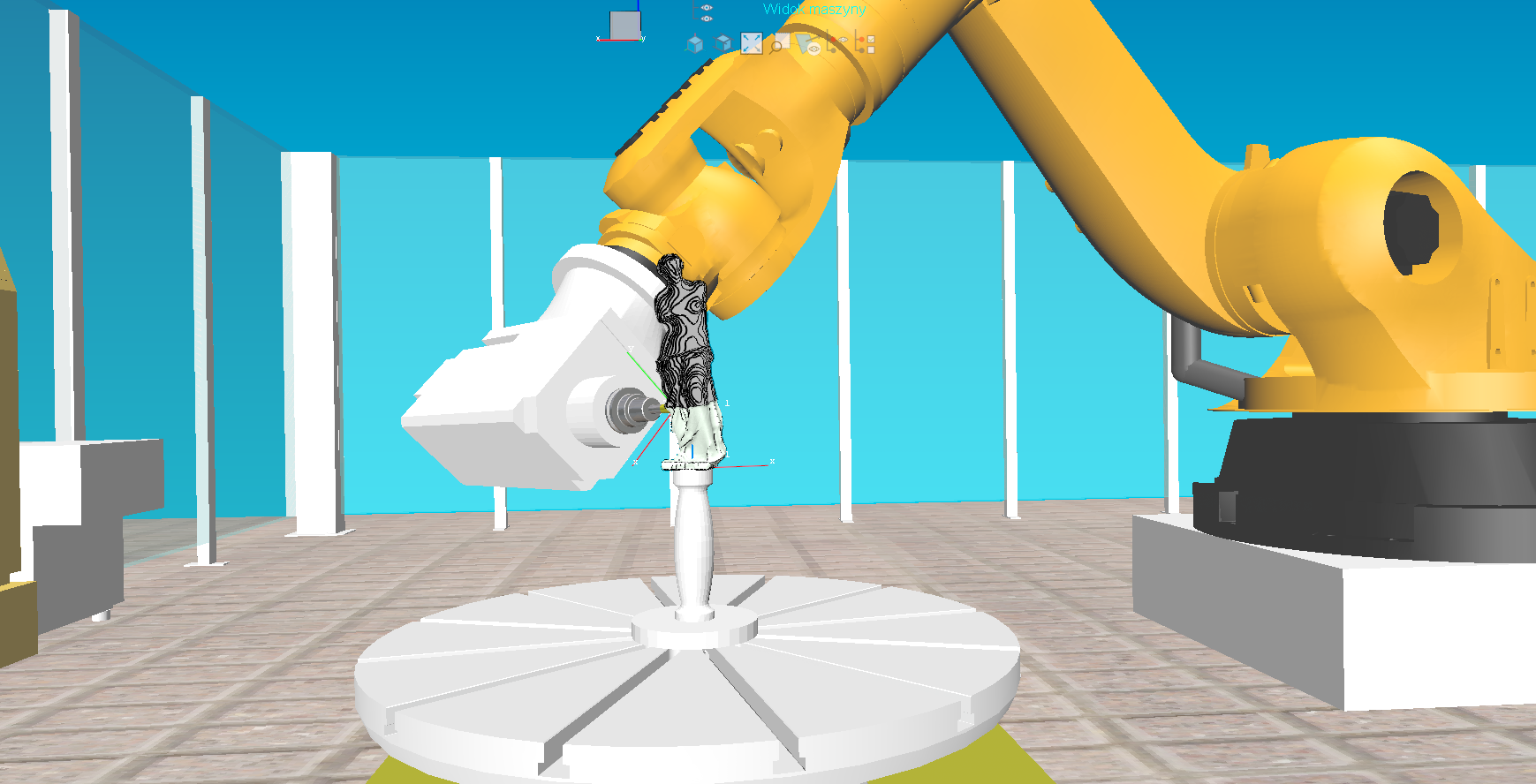

Efektem pracy jest idealnie odwzorowany kształt posągu Wenus z Milo, który może z powodzeniem stanowić ozdobę Państwa ogrodów!